Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Quadricopter. Mar 23 Aoû 2016 - 11:27
Bonjour à tous,
Il y a quelques temps, j'ai acheté un petit quadricopter (drone) jouet et pas très cher (GH-4L de chez Simulus)
C'est un petit appareil de 20cm de côté qui doit peser environ 40g (batterie comprise). Il est livré avec deux batteries LiPo de 300mAh qui donne une autonomie pratique de 6mn par batterie (9mn sur la boîte). Il est équipé d'un Gyroscope/Accéléromètre 6 axes, ce qui est le minimum pour ce genre d'appareil. Le châssis est en plastique assez souple et résiste très bien à tous les chocs (bon point).
Remarque, se méfier, dans les jouets on trouve des 3 axes (gyroscope uniquement). Le minimum est 6 axes pour être stable.
- Essais en intérieur:
Il faut commencer par ajuster les "trimmers" de stabilisation, première constatation ceux-ci varient avec la décharge de la batterie.
Difficile de stabiliser l'altitude, il monte ou descend tout le temps, la commande de gaz (Throttle) est trop sensible ou pas assez précise. Latéralement il se déplace très vite, et si la pièce est trop petite, on termine vite dans un mur.
- Essais en extérieur:
De préférence un jour sans vent, comme il est très léger, il est emporté au moindre courant d'air et pas toujours assez de puissance pour le ramener. Avec un peu d'habitude on arrive à faire des choses amusantes.
Je l'ai démonté pour voir ce qu'il a dans le ventre.
L'électronique est subminiature, j'ai quand même vu qu'il utilise bien un MPU-6050 qui est le composant Gyroscope/Accéléromètre 6 axes le plus classique, la pub n'est pas mensongère. Le µC est caché dans un "jaja" noir. Et impossible de mettre à jour le logiciel, pour faire des améliorations. C'est là tout le problème de tout ce qui n'est pas open-source. Pour la liaison radio (2.4GHz) il utilise un tout petit module (environ 1cm de côté) avec un BK2421 bidirectionnel, le même que sur la télécommande. Cette liaison bidirectionnelle permet de renvoyer la télémétrie de l'état de la batterie vers la télécommande pour créer une alarme avant que les moteurs se coupent. Les commandes sont envoyées sous forme d'octets, dans une trame série de 8 octets, sur un bus SPI. 0 à 255 pour les gaz (Throttle), et -127 à +127 pour autres les valeurs. Ce qui peut expliquer l'imprécision des réglages. (En Radio commande classique on est sur 1000 points)
Un peu déçus, mais on en a toujours pour son prix.
Après avoir vu pas mal de vidéos de quadricopter, cela m'a donné envie d'en construire un moi même.
On trouve toutes les pièces sur e-bay ou sur Amazon.Il faut compter environ 150€ pour le châssis, les moteurs, pour le contrôle utilisation d'un Arduino Nano, batterie LiPo. Auquel il faut ajouter événtuellement la télécommande entre 50 et 70€ suivant les modèles, et le chargeur LiPo.
J'ai trouvé un site qui explique très bien comment ça fonctionne:
http://www.brokking.net/
Le modèle que je construis est quasiment celui qu'on voit sur la première vidéo du site, avec un châssis de 450mm. Il utilise un Arduino Uno, mais on peut utiliser le Nano qui a le même µC. Il donne aussi tous les sources de ses programmes. Avec ses explications, on comprends aussi pourquoi il faut 6 axes minimum.
et toutes ses vidéos:
https://www.youtube.com/user/MacPuffdog/videos
A+ JCV
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Jeu 25 Aoû 2016 - 11:25
Bonjour Jean-Claude,
Vraiment super !
J'avais cru au début que tu t'y mettais histoire d'en piloter un.
Mais non, tu en construis un de bout en bout
Tiens-nous au courant de tes avancées...
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 25 Aoû 2016 - 11:35
Bonjour Alain,
Vous aurez bientôt quelques photos.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 25 Aoû 2016 - 14:17
Bonjour,
Pour la construction d'un quadicopter il faut d'abord commencer par le chassis, les moteurs, les helices.
- Le chassis:
Je me suis orienté vers un F450 ou H450, soit 45cm entre deux moteurs sur le même axe, Helices de 10pouces (25cm). Un grand modèle comme celui-ci est plus adapté au vol stable et à la prise de vue embarquée.
Il existe des modèles plus petits dit "Racer" pour du vol acrobatique avec des Helices de 9cm.
- Les moteurs:
La puissance des moteurs qu'il faut dépend essentiellement du poids maximum de l'appareil. J'ai déterminé que le mien devrait peser à peu près 1kG pour une première version. Après pas mal de recherches, j'ai cru comprendre que pour 1kg des moteurs de 150W devraient être suffisant, et que pour 1k5, il vaut mieux des 200W
On utillise des moteurs sans-ballais (brushless) fonctionnant en alternatif tri-phasé, ce sont des moteurs synchrones. Le moteur doit être alimenté par un convertisseur qui transforme le courant continu de la batterie en courant alternatif triphasé à fréquence variable. Le convertisseur est un ESC (Electronic Speed Controler). De ce que j'ai compris, il fonctionne comme un ampli BF classe D, avec une fréquence de découpage de 8 ou 16kHz suivant les modèles. La fréquence BF est synchronisée sur la vitesse de rotation.
Sur mon chassis, j'ai monté des moteurs 2212/1000KV, 22 est le diamètre du stator, 12 le nombre de bobines du stator, et 1000KV est le nombre de tours/mminutes par volt. Un autre caractéristique est le courant max qui est de 12A à 12.5V, soit 150Watts.
On remarque tout de suite que la consommation max pour les 4 moteurs va être ici de 600W. Avec un ESC qui a un rendement de 70% cela va faire 850W de pomper sur la batterie soit 64 ampères en 12.5V.
J'ai aussi des 2212/920KV courant max de 18A soit 225W.
ces deux moteurs sont adaptés pour des grandes Helices (25cm).
Remarque: un 920KV tourne moins vite qu'un 1000KV mais a plus de couple. - KV élevé, vitesse de rotation élevée, moins de couple. - KV faible, vitesse de rotation plus faible, couple plus élevé.
- Les moteurs et ESC montés sur les bras du châssis.
- Le châssis monté avec ses moteurs.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 25 Aoû 2016 - 14:51
Bonjour,
- Pilotage des ESC:
Le pilotage des ESC se fait par un signal PWM (Pulse With Modulation). La durée de l'impulsion est toujours comprise entre 1000 et 2000 micro-secondes, avec une période de répétition de 4mS (250Hz) à 5mS (200Hz) en général, non critique, on trouve de 2mS à 20mS. La télécommande à une période de répétition à 20mS (50Hz).
- Carte de commande:
Pour piloter tout cela, il faut une carte de commande ou controleur de vol, appelée FC (Flight Controler). J'ai utilisé une carte Arduino Nano, pour la facilité de programmation, aussi bien sous Windows que sous Linux.
Sur la photo, on voit que la carte est équipée d'une seconde petite carte qui contient un circuit intégré MPU-6050, le gyroscope 3 axes (indispensable) plus l’accéléromètre 3 axes (fortement recommandé).
A+ JCV
alex71 Membre d'Honneur
Age : 34 Localisation : Saône-et-Loire / France Prénom : Alexis Date d'inscription : 08/05/2009
Sujet: Re: Quadricopter. Ven 26 Aoû 2016 - 12:57
Bonjour,
Super intéressant ton sujet Hâte de voir ce que ça donne en vidéo!
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Lun 29 Aoû 2016 - 17:58
Bonjour Jean-Claude,
En effet, hyper intéressant !
Tu a écrit:
le mien devrait peser à peu près 1kG pour une première version.
Hé bien, c'est du lourd quand même. Mais avec la conso que tu expliques, il est vrai que la batterie doit peser son poids.
Et avec ça tu vas pouvoir faire de superbes photos aériennes de ta maison...
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Mar 30 Aoû 2016 - 11:24
Bonjour,
Pour vous donner une petite idée de l'avancement, une photo du banc de test:
Sur cette photo, le récepteur n'est pas encore connecté au contrôleur de vol. Mais depuis il est connecté, je contrôle la vitesse des moteurs à distance avec la télécommande. Les PID sont programmés et fonctionnent aussi avec des valeurs par défaut, qu'il faudra affiner à l'utilisation.
Le schéma de ma carte contrôleur de vol:
Utilisation d'un Arduino Nano avec un logiciel "fait maison".
ESC1 à 4 sont les sorties PWM de commande des moteurs CH1 à 4 viennent du récepteur de télécommande. AUX1 est utilisé pour commuter le mode de fonctionnement en Gyro seul ou en Gyro plus Accel, à partie de la télécommande AUX2 n'est pas utilisé. I2C pour la communication avec le module Gyro+Accel.
Je mesure aussi la tension de batterie en A3, pour pouvoir créer une alarme avant qu'elle soit déchargée.
Le montage prototype:
Cela fait un peu bidouille, mais permet de faire des modifs facilement pour la mise au point sur table. Pour le vol il faudra bien sûr construire une carte prototype soudée.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Dim 4 Sep 2016 - 11:25
Bonjour,
Pour la construction du signal PWM de commande des moteurs, on aurait pu utiliser le PWM hardawre interne au microcontrôleur du Nano (Atmel328p). Le problème se situe au niveau de la résolution. Ce PWM est sur 8 bits, soit 256 points pour couvrir de 0 à 100%. Hors ici on ne doit couvrir que la plage 1mS à 2mS avec une période à 4mS, cela ne fait que 25% de la plage. Bien que certains logiciels pour quadricopter s'en contente, j'ai préféré faire la construction du pwm par software. Comme le timer du µC peut compter en µS, on peut avoir 1000 points entre 1mS et 2mS.
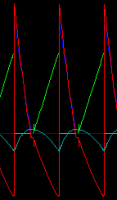
Captures écran signal PPM:
Ici on voit en jaune le PWM, 1mS (1000µS) avec une période de 4mS (4000µS). Et en bleu les temps de calculs.
Ici on voit le même signal avec le PWM à 2mS, mais limité 1800µS pour laisser de la marge aux corrections données par les PID d'asservissement.
Pour ne pas interférer avec la construction du PWM, j'ai réparti les temps de calculs en deux partie, courbe en bleu.
La première partie (environ 750µS), contient principalement la lecture des capteurs.
La seconde partie (environ 1100µS), contient principalement le calcul des PID en virgule flottante.
Sur cette seconde partie, il faut ajouter le temps dû au dialogue avec le PC via la liaison USB. Ce temps fluctue tout le temps et est compris entre 0 et 600µS. Soit au maximum 1700µS, inférieur aux 2000µS maxi dont on dispose pour cette partie.
Debug, communication avec le PC:
Pour la communication avec le PC, j'ai adopté un double protocole:
Protocole texte pour la communication avec un terminal, par défaut au démarrage.
Protocole MultiWii, pour la communication avec l'IHM graphique MultiWii. Ce protocole est très bien documenté.
Le basculement entre les deux protocoles et automatique par principe.
Ci-dessous une présentation de l'IHM MultiWii.
Firmware v1.x
En écrivant moi-même ce logiciel, cela me permet d'en mieux comprendre le fonctionnement.
Pour ceux que ça intéresse une version du firmware actuel en perpétuelle évolution.
ATTENTION: ne pas essayer de faire voler un Quadricopter avec cette version non finalisée, qui comporte encore de nombreux problèmes. Par sécurité, ne faire des essais que sans les hélices.
firmware v1.5
Mise à jour du fichier firmware le 16/09/2016 Mise à jour du fichier firmware le 26/09/2016 v1.5
A+ JCV
Dernière édition par JCV le Lun 26 Sep 2016 - 10:14, édité 3 fois
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Jeu 8 Sep 2016 - 8:32
Bonjour Jean-Claude,
Je me répète : sacré projet et belle réalisation.
Et qu'en attends-tu comme performances ?
Vitesse, altitude... autonomie (quoique sur ce dernier point tu en as déjà un peu parlé).
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 8 Sep 2016 - 10:41
Bonjour Alain;
Asl a écrit:
Et qu'en attends-tu comme performances ?
Vitesse, altitude... autonomie (quoique sur ce dernier point tu en as déjà un peu parlé).
Au niveau performances, aucune idée, j'espère au moins qu'il va décoller. Et si oui, ne pas partir directement dans le décor, comme j'ai vu sur certaines vidéos.
Actuellement, je suis bloqué, j'attends des connecteurs qui viennent de Chine, Ils ont été envoyés il y a une quinzaine. Ils doivent être dans un bateau perdu quelque part. Chez Farnell, ils étaient 5 fois plus cher et frais de port en plus.
Avant le premier décollage, il faut faire pleins de vérifications, entre autres: Que les moteurs tournent dans le bon sens (c'est déjà fait, mais il vaut mieux vérifier deux fois, plutôt qu’une). Il faudra aussi vérifier que les asservissement agissent dans le bon sens, c'est à dire en compensant, et non pas en amplifiant les erreurs (ce qui a dû se passer sur les vidéos de crash que j'ai vu), il peut y avoir de la surcompensation, en général ça se traduit par des vibrations.
A propos de vibrations, j'ai vu que certains faisait un équilibrage de l'ensemble moteur hélice, comme on le fait pour les roues de voitures. Ce qui évite à l'accéléromètre de devoir supporter des vibrations qui ajoutent du bruit sur la mesure. Ce qui explique que certains jouets deviennent de plus en plus instable une fois que les hélices ont pris quelques chocs.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 8 Sep 2016 - 10:49
Re,
Peut être qu'un jour j'arriverais à ce résultat:
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Sam 10 Sep 2016 - 10:44
Bonjour,
Reçu les connecteurs, une demi journée de câblage, et voila le résultat:
A+ JCV
Edenguard Chef de Projet
Age : 37 Localisation : Landes Prénom : Christophe Date d'inscription : 01/10/2008
Sujet: Re: Quadricopter. Sam 10 Sep 2016 - 11:04
Salut les amis !
Bien beau projet que tu as là Mr Jean-Claude J'en avais commencé un aussi il y a quelques années, mais je faisais moi même une structure, en alu, donc un peu trop lourd. A ce temps là il n'y avait pas encore les imprimantes 3D aussi répandues et donc pas de "bras" dispos facilement. Et en alu, même si c'est assez léger, çà reste lourd pour un tel engin. En prime je comptais utiliser 4 batteries assez grosses, donc le tout bien trop lourd. Du coup les pièces traînent dans un coin ^^ Mais je compte bien m'y remettre un jour.
Mais là en ce moment on fait une chambre au fond de la maison, que je vais monter en atelier. Cela me permettra de recommencer à bricoler comme il faut ! J'aurais enfin un bon petit atelier pour tous les bricolages, bidouillages, expériences, etc, je pourrais tout reprendre Et puis çà permettra de continuer les travaux pour essayer de finir la maison avant cet hiver, c'est pas gagné mais bon, cela va y contribuer pas mal ^^
Bon courage pour ton système !
A+
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Sam 10 Sep 2016 - 15:39
Bonjour Christophe,
En aluminium, et surtout avec 4 batteries, effectivement ça devait être bien lourd. J'ai pesé le mien, avec la batterie, prêt à voler, je suis à 870 grammes.
Je viens de faire quelques essais (fixé au sol, pour ne pas partir dans le décors tout de suite). Au tiers de la puissance on sent déjà qu'il a envie de partir. Il va falloir que je revois le paramétrage des PIDs, car les moteurs vibrent assez fort. Le problème est que ce paramétrage n'est faisable qu'en USB, donc avec un fil à la patte, pas pratique.
A la maison, comme j'ai été pendant 10ans en télétravail, je m'était fait un coin dans le grenier, réaménagé en bureau et petit Labo (photo du banc test ci-avant), c'est bien pratique.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Dim 11 Sep 2016 - 10:31
Bonjour,
La batterie:
Pour mes premiers essais, j'utilise une batterie de 2200mAh. Sur les quadcopters on utilise une batterie de type LiPo (Lithium-Polymère) qui présente actuellement le meilleur rapport poids/capacité.
Ce type de batterie spéciale est aussi capable d'un courant de décharge très élevé, indiqué par le 30C, c'est a dire ici 30x2200 donne 66A, ce qui veut dire que cette batterie est capable de délivrer un courant de 66A pendant 54s. C'est court mais cela fait quand même plus de 730W (quasi un cheval-vapeur).
On voit aussi que le courant maxi indiqué est de 132A, ce qui doit correspondre au courant de cour-circuit.
Cette batterie est constituée de 3 élément en série de 3.7V soit une tension nominale de 11.1V.
Note: faire attention à la qualité de ces batteries, certaines peuvent être de mauvaise qualité, et avec de tel courant prendre feu. D'autre part, elle sont interdites de transport en avion. Et en France, le fournisseur doit être situé en France.
Le chargeur:
Le chargeur est de type spécial, car il ne faut pas que la tension dépasse 4.2V par élément.
La batterie a deux connecteur: - Un principal pour la charge et la décharge. - Un secondaire qui permet de contrôler la tension aux bornes de chaque élément pendant la charge. Et accessoirement pendant la décharge.
A+ JCV
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Mer 14 Sep 2016 - 11:29
Bonjour Jean-Claude,
Parlons un peu du nerf de la guerre
A combien revient ou va revenir ton aéronef ?
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Mer 14 Sep 2016 - 14:05
Bonjour Alain,
Le nerf de la guerre, coût de la machine. J'avais fait un petit document :
Bilan financier du Quadricopter
160€ pour l'appareil lui même (en modèle de base), auquel il faut ajouter la télécommande et le chargeur de batterie qui peuvent servir pour d'autres appareils. Par la suite, on peut le faire évoluer: ajouter altimètre, gps, caméra, etc ... et devenir équivalent au haut de gamme.
Cela revient plus cher qu'un modèle comme ceux qu'on commence à trouver dans les supermarchés (ou autres). Mais cela restera toujours moins cher qu'un appareil haut de gamme équivalent. Et puis il y a tout le plaisir de la construction par soi même, d'autant plus (pour moi) que toute la conception informatique embarquée est très proche de mon ancien métier.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Jeu 15 Sep 2016 - 19:43
Bonsoir,
Premier petit essai, avec les hélices, en le tenant à la main (par au dessous), je n'ai pas monté la puissance au delà de 1/3, on sent déjà qu'il a envie de partir.
Le premier test a consisté à voir s'il s'oppose bien à tous les mouvement de la main, ce qui est le cas pour les basculements avant-arrière (pitch) ou droite-gauche (roll), il y a tellement de force qu'il est quasiment impossible de le basculer . Mais des réactions bizarres à la rotation (yaw). Encore des petits bugs à corriger, avant les essais en vol.
Bientôt la suite (après avoir trouvé et corrigé le petit problème).
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Ven 16 Sep 2016 - 9:29
Bonjour,
Mise à jour du fichier firmware en v1.5, qui a servi pour le test ci-dessus.
firmware v1.5
ATTENTION: éviter de faire voler un Quadricopter avec cette version non finalisée, qui comporte encore de nombreux problèmes. Par sécurité, faire la calibration et tous les essais de vérification sans les hélices.
v1.3 : Actuellement seul le mode normal gyro commence à fonctionner, sans actionner les sticks de la télécommande.
v1.5 : J'ai pu effectuer un premier vol en mode Gyro. Encore beaucoup de vibrations, il y a surcompensation au niveau de l'asservissement. En mode Angle, il y a amélioration par rapport à la v1.3, mais encore trop instable.
A+ JCV
Dernière édition par JCV le Lun 26 Sep 2016 - 10:21, édité 1 fois
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Ven 16 Sep 2016 - 11:15
Bonjour Jean-Claude,
Ton "enfant" est vraiment très beau.
Et en fin de compte pas si cher que ça, du moins très abordable au vu de ses caractéristiques, surtout si on le compare comme tu le dis à : "un appareil haut de gamme équivalent".
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Ven 14 Oct 2016 - 16:48
Bonjour,
Le quadri commence à prendre forme, j'ai fait un petite vidéo d'un des dernier essais. Pas évident à contrer en altitude, mais j'ai une bonne stabilité pour garder la position horizontale. La commande de gaz (throttle) est trop directe. L'appareil est monté à plus de 10m et j'ai coupé les gaz un peu vite pour que le vent ne l'emporte pas chez les voisins, ce qui explique la descente rapide. Pas eu de casse.
A+ JCV
Asl Support Electronique Membre d'Honneur
Age : 73 Localisation : Près de Saumur Prénom : Alain Date d'inscription : 15/08/2006
Sujet: Re: Quadricopter. Sam 15 Oct 2016 - 11:15
Bonjour Jean-Claude,
Sacrée belle réussite !
Bel engin qui doit quand même être un peu difficile à piloter. Mais avec quelques heures de pratique...
@++
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Sam 15 Oct 2016 - 11:40
Bonjour Alain,
C'est vrai qu'avec un peu de pratique, ça devrait être mieux, et aussi avec un peu plus d'espace autour. Dans le champ derrière chez moi ils ont coupé le maïs, mais le sol n'est pas très plat (à l'échelle de l'appareil), dans la pâture à vache l'herbe est haute et les hélices font tondeuse à gazon.
Pour faciliter le pilotage, je vais essayer d'ajouter un bout de logiciel pour adoucir le variation d'altitude à l'aide de accéléromètre.
A+ JCV
JCV Support Electronique
Age : 75 Localisation : France (Nord) Prénom : Jean-Claude Date d'inscription : 28/04/2008
Sujet: Re: Quadricopter. Lun 17 Oct 2016 - 9:57
Bonjour,
Le firmware en v1.8, qui a servi pour le test en vol de la vidéo ci-dessus.
firmware v1.8
Pour les calculs d'attitude et de PID, j'ai repris le code du MultiWii, histoire de me simplifier la vie. Ce code est donc fortement dérivé du MultiWii sauf pour la partie moteur (PWM software sur 1000 points) et pour la partie radio-commande. Le "CycleTime" est à 4mS et reste stable à 0.1% (3mS variable sur le MultiWii).
ATTENTION: Avant de faire voler le quadricopter, il faut vérifier faire pas mal de vérifications, équilibrage des helices, sens de rotation, branchement des moteurs, calibration des esc, etc ... Je vérifie aussi en tenant le quadri dans la main qu'il réagit dans le bon sens, attention de ne pas l'approcher trop près de sois.
Translate entire Forum in your language Traducir toda Foro en su idioma Tradurre tutto il Forum nella tua lingua Traduzir Fórum inteira no seu idioma Перевести весь форум на вашем языке
Ecoutez "RTFM" tout en surfant sur le Forum
VOUS VOULEZ NOUS REFERENCER SUR VOTRE SITE, BLOG OU FORUM ?